About Me
Ever since I remember, solving complex problems fascinated me. My interest in mathematics, mechanics,
and informatics led me to my bachelor's studies in Mechatronics and Information Technology.
When I learned about robotics, I fell in love with its versatility, complexity and challenges.
That's why I shifted my focus to software development, chose my master's program Robotics, Cognition, Intelligence, and relocated to Munich.
At the same time, I started to work in the start-up company Agile Robots to get hands-on experience.
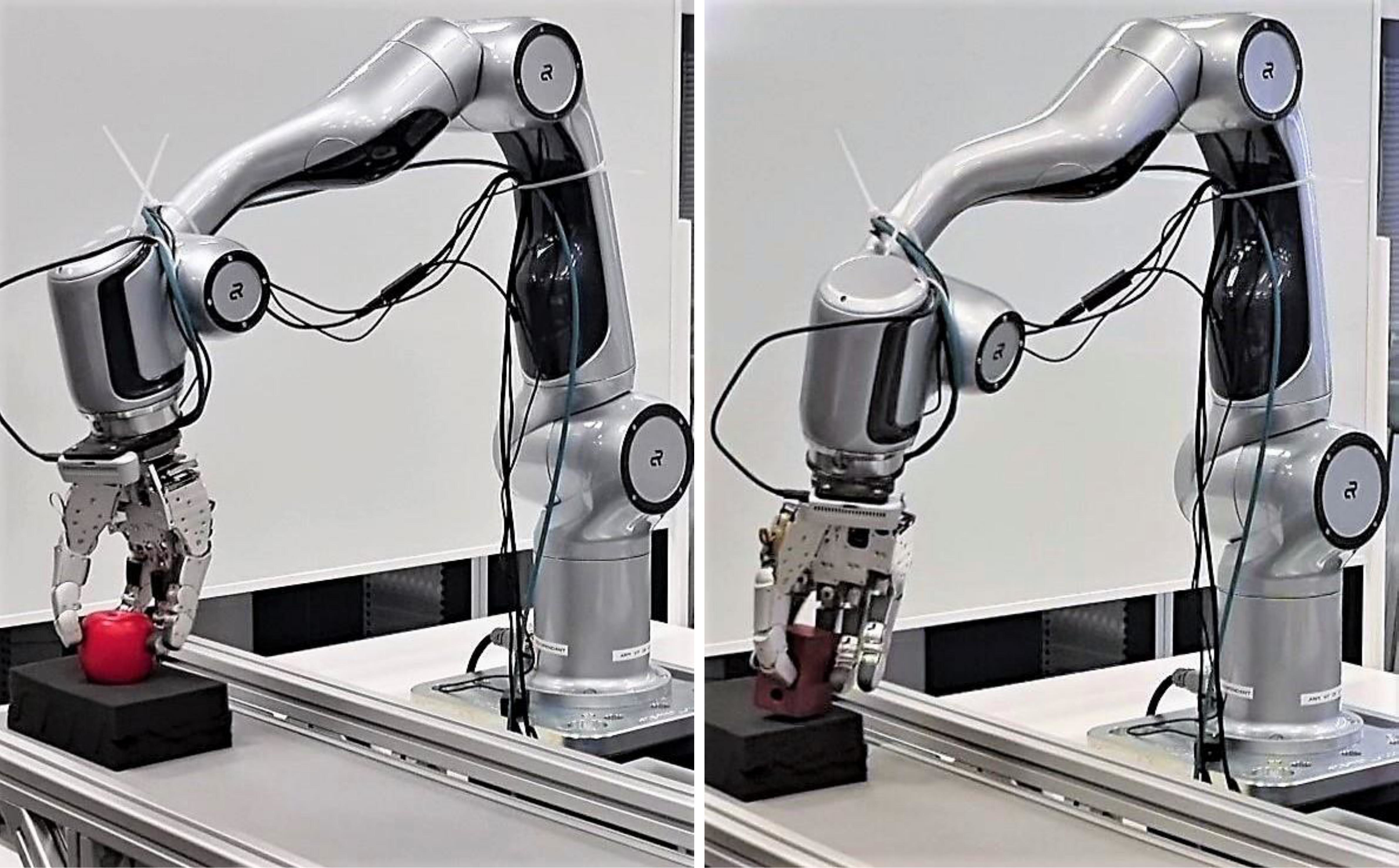
Here, I also completed my master's thesis to enable robotic grasping by combining visual servo control with deep learning.
Today, I am working as a PhD candidate in the Mobile Robotics Lab at the Technical University of Munich/ ETH Zürich under the supervision of Prof. Stefan Leutenegger.
My research evolves around event-based vision and its opportunities for robot control, funded by the Munich Center for Machine Learning.
My Publications

SuperEvent: Cross-Modal Learning of Event-based Keypoint Detection for SLAM
Yannick Burkhardt, Simon Schaefer, Stefan Leutenegger.
2025 IEEE/CVF International Conference on Computer Vision (ICCV) - Highlight.
2025 IEEE/CVF International Conference on Computer Vision (ICCV) - Highlight.
Dynamic Grasping of Unknown Objects with a Multi-Fingered Hand
Yannick Burkhardt, Qian Feng, Karan Sharma, Zhaopeng Chen, Alois Knoll.
2024 IEEE-RAS International Conference on Humanoid Robots.
2024 IEEE-RAS International Conference on Humanoid Robots.